人工智能和深度学习研究中心
我们正在巴黎中心建设一个汽车应用人工智能研究中心,来开展我们雄心勃勃的研究项目,尤其是辅助驾驶和无人驾驶方面
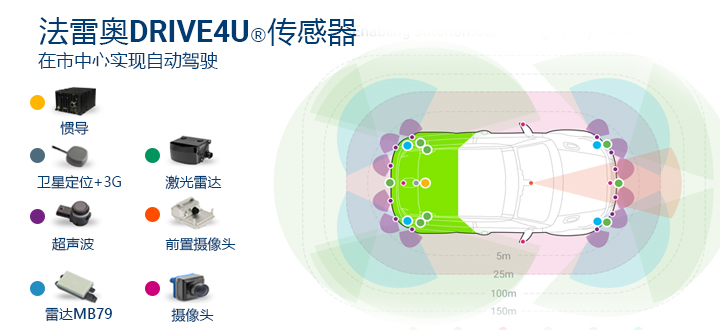
多传感器感知
无人驾驶首先依赖于各式各样的传感器,例如法雷奥相机、激光雷达、雷达和超声波。在任何时刻,最大程度的探索这些传感器的输出是了解车辆复杂环境的基础。为此,我们探索了各种各样的深度学习方法,其中传感器的学习被认为是既独立又互相联系的。
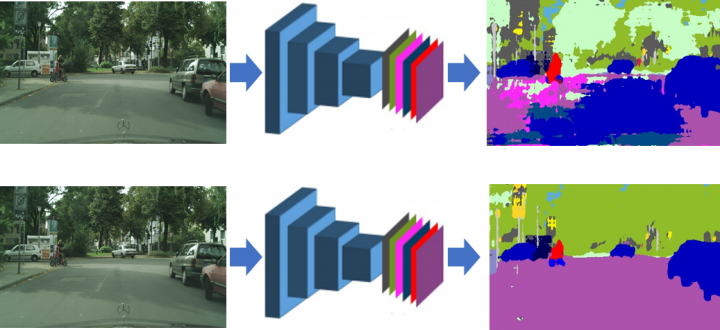
领域适应
深度学习和强化学习是无人驾驶的关键技术。而其面临的挑战之一便是适应训练期间所遇到的各种条件。为了提高系统在这种情况下的性能,我们探索了所谓的领域适应技术,例如在AdvEnt,我们的项目在CVPR 2019上所展示的。
不确定性分析
当发生意外情况或天气恶劣时,传感器发生阻塞,装载的感知系统应诊断情况并作出响应,例如,调用另一替代系统或人工驾驶。考虑到这一点,我们研究了评估系统不确定性和预测其性能的自动方法。

团队阵容
-
 R&I 技术工程师 Florent Bartoccioni
R&I 技术工程师 Florent Bartoccioni
R&I 技术工程师
ENS Rennes | CTU Prague | INRIA
Pragmatic dreamer


-
 研究员 Victor Besnier
研究员 Victor Besnier
研究员
Sorbonne Université | ENPC
-
 研究员 Alexandre Boulch
研究员 Alexandre Boulch
研究员
X | MVA | ENPC | ONERA
3D perceiver
-
 高级研究员 Andrei Bursuc
高级研究员 Andrei Bursuc
高级研究员
机器学习 | 计算机视觉 | 视觉搜索 | 自主系统
Politehnica | Mines | Inria | Safran
Random walker

-
 博士 Amaia Cardiel
博士 Amaia Cardiel
博士
SciencesPo | SorbonneU | UGA
Language learner
-
 博士 Loick Chambon
博士 Loick Chambon
博士
MVA | Sorbonne
Climber
-
 研究员 Mickaël Chen
研究员 Mickaël Chen
研究员
Sorbonne Université
Entropy producer
-
 研究总监 Matthieu Cord
研究总监 Matthieu Cord
研究总监
深度学习 | 计算机视觉 | 视觉和语言
Enseirb | CergyU | KULeuven | Ensea | CNRS | SorbonneU | IUF
Top chef
-
 研究员 Spyros Gidaris
研究员 Spyros Gidaris
研究员
深度学习 | 计算机视觉
AUTH | Cortexica | ENPC
Life-loving epicurean
-
 研究员 David Hurych
研究员 David Hurych
研究员
机器学习 | 计算机视觉 | 生成网络
CTU-Prague | NII-Tokyo
Curious
-
 博士 Victor Letzelter
博士 Victor Letzelter
博士
Telecom Paris | MVA | EMSE
Landscape explorer
-
 研究总监 Renaud Marlet
研究总监 Renaud Marlet
研究总监
计算机视觉 | 摄影测量 | 几何处理
X | Inria | EdinburgU | Simulog | Inria | TrustedLogic | Inria | ENPC
Persistent eclectist
-
 博士 Tetiana Martyniuk
博士 Tetiana Martyniuk
博士
Mines Paris | INRIA
Proud Ukrainian
-
 博士 Björn Michele
博士 Björn Michele
博士
DHBW | MVA | IRISA | UBretagne Sud
Domain adapter
-
 项目主任 Serkan Odabas
项目主任 Serkan Odabas
项目主任
Sorbonne Université | Inria
Gamer
-
 研究员 Gilles Puy
研究员 Gilles Puy
研究员
Computer Vision | Deep Learning
Supélec | EPFL | INRIA | Technicolor
-
 研究员 Nermin Samet
研究员 Nermin Samet
研究员
METU | ENPC
Book wanderer
-
 博士 Corentin Sautier
博士 Corentin Sautier
博士
Mines Paris | MVA | ENPC
Annotations hater
-
 博士 Sophia Sirko-Galouchenko
博士 Sophia Sirko-Galouchenko
博士
DauphineU | MVA | SorbonneU
Borscht-powered Cyborg
-
 高级研究员 Eduardo Valle
高级研究员 Eduardo Valle
高级研究员
CergyU | University of Campinas
Neural optimizer
-
 研究员 Tuan-Hung Vu
研究员 Tuan-Hung Vu
研究员
深度学习 | 计算机视觉
Telecom | Inria | NEC
Protein lover
-
 研究员 Yihong Xu
研究员 Yihong Xu
研究员
Telecom Bretagne | Inria | UGA
Troublemaker
-
 研究员 Eloi Zablocki
研究员 Eloi Zablocki
研究员
X | MVA | SorbonneU
Substancial learner


