Valeo.ai
Depuis 2017, notre centre de recherche en intelligence artificielle est à la pointe de la recherche en IA dans l'industrie automobile, notamment dans les domaines de la conduite assistée et autonome.
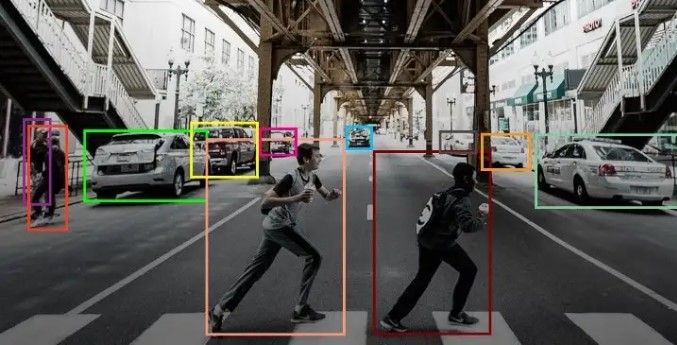
Compréhension de la scène grâce à de multiples réseaux de capteurs
Les véhicules autonomes sont équipés de divers capteurs, notamment des caméras, des LiDARs (abréviation de Light Detection And Ranging), des radars, des capteurs ultrasoniques et des unités de mesure inertielles. Ces capteurs travaillent ensemble pour fournir une compréhension complète de l’environnement. Les données sont fusionnées pour créer une cartographie environnante, essentielle pour permettre au véhicule de percevoir et de comprendre son environnement.
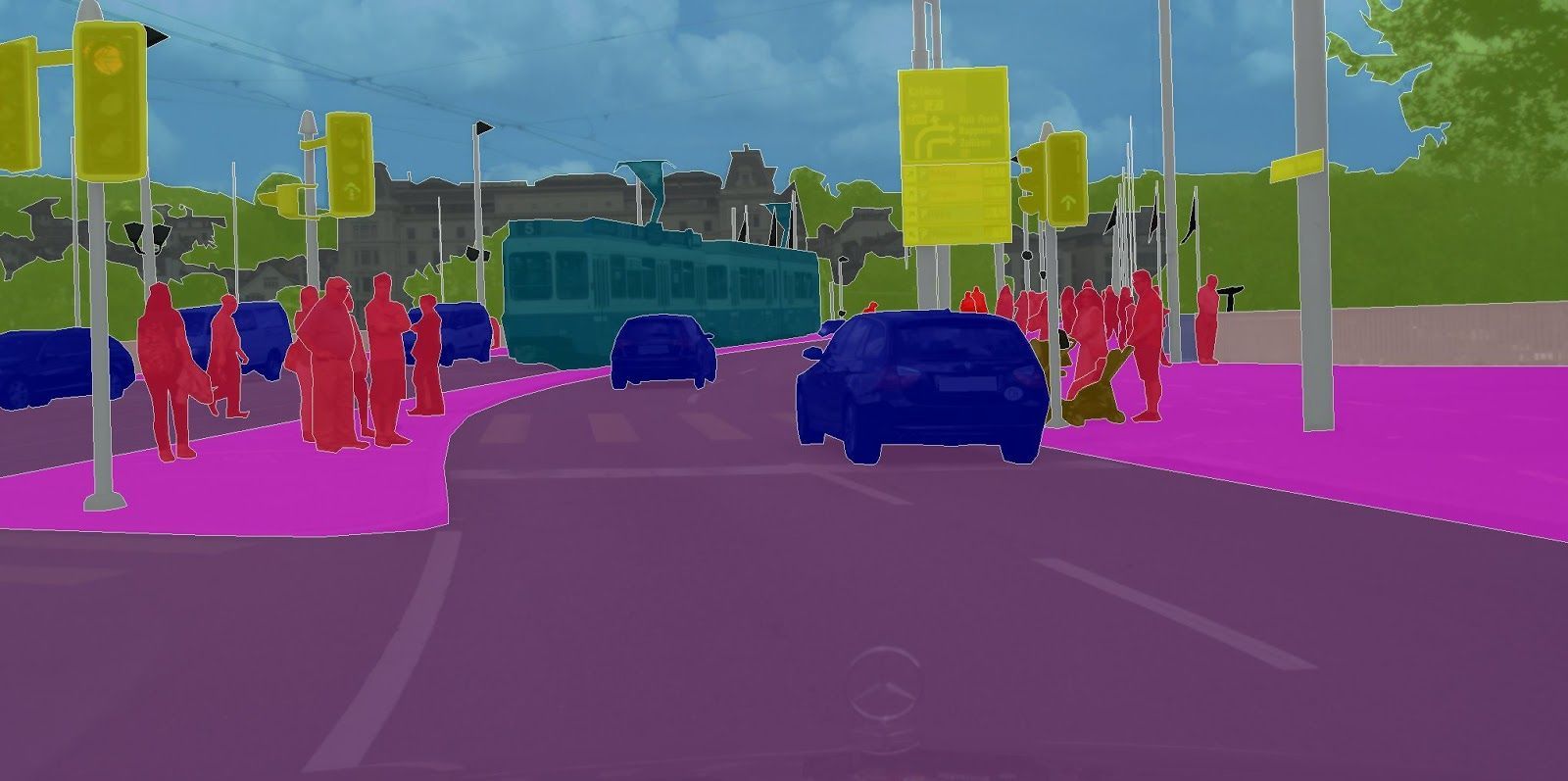
Annotation et Apprentissage efficace des données
La collecte et l’annotation d’un grand nombre de données sont coûteuses et chronophages. Nos chercheurs explorent des alternatives à l’apprentissage supervisé classique, réduisant ainsi les coûts liés à l’annotation.
La recherche en perception dans un monde ouvert se concentre sur le développement de modèles capables de détecter et de s’adapter à des objets et situations nouveaux, tout en garantissant des opérations sûres et cohérentes dans des environnements dynamiques réels.
Modèles fiables
Les véhicules autonomes sont des appareils critiques qui nécessitent une conception extrêmement soignée pour un déploiement sûr et robuste.
Ils doivent fonctionner avec confiance dans des contextes nouveaux ou inattendus par rapport aux scénarios d’entraînement. Cela nécessite une généralisation des domaines, en construisant des systèmes capables d’adapter leur apprentissage à de nouveaux environnements avec des résultats fiables dans des scénarios pratiques.
Notre recherche inclut également des méthodes permettant de fournir des explications claires sur les décisions prises par ces systèmes complexes, avec pour objectif ultime d’offrir une transparence sur leur comportement, aussi bien dans des situations normales ou anormales. Nous cherchons à renforcer la confiance dans ces systèmes, en anticipant, expliquant et éliminant les biais susceptibles de conduire à des incidents.
Rencontrez notre équipe
-
 Ingénieur technique R&I Florent Bartoccioni
Ingénieur technique R&I Florent Bartoccioni
Ingénieur technique R&I
Perception | Scene understanding | Dynamic forecasting
ENS Rennes | CTU Prague | INRIA
Pragmatic dreamer


-
 Chercheur Victor Besnier
Chercheur Victor Besnier
Chercheur
Deep Learning | Computer Vision | Image Synthesis
Sorbonne Université | ENPC
-
 Chercheur Alexandre Boulch
Chercheur Alexandre Boulch
Chercheur
Computer vision | Deep Learning | Geometry processing
X | MVA | ENPC | ONERA
3D perceiver
-
 Chercheur senior Andrei Bursuc
Chercheur senior Andrei Bursuc
Chercheur senior
Machine Learning | Computer Vision | Reliability | Self-supervised learning
Politehnica | Mines | Inria | Safran
Random walker
-
Doctorant Amaia Cardiel
Doctorant
Deep learning | Vision and Language
SciencesPo | SorbonneU | UGA
Language learner
-
Doctorant Loick Chambon
Doctorant
Deep learning |Computer Vision
MVA | Sorbonne
Climber
-
Chercheur Mickaël Chen
Chercheur
Generative Models | Forecasting
Sorbonne Université
Entropy producer

-
Directeur de recherche Matthieu Cord
Directeur de recherche
Deep Learning | Computer Vision | Vision and Language
Enseirb | CergyU | KULeuven | Ensea | CNRS | SorbonneU | IUF
Top chef
-
Chercheur Spyros Gidaris
Chercheur
Deep Learning | Computer Vision
AUTH | Cortexica | ENPC
Life-loving epicurean
-
 Chercheur David Hurych
Chercheur David Hurych
Chercheur
Machine Learning | Computer Vision | Generative Networks
CTU-Prague | NII-Tokyo
Curious
-
Doctorant Victor Letzelter
Doctorant
Deep Learning | Uncertainty Quantification | Signal processing
Telecom Paris | MVA | EMSE
Landscape explorer
-
Directeur de recherche Renaud Marlet
Directeur de recherche
Computer vision | Scene Understanding | 3D | Geometry Processing
X | Inria | EdinburgU | Simulog | Inria | TrustedLogic | Inria | ENPC
Persistent eclectist
-
Doctorant Tetiana Martyniuk
Doctorant
Deep learning | Computer Vision
Mines Paris | INRIA
Proud Ukrainian
-
Doctorant Björn Michele
Doctorant
Computer vision | Deep Learning | Frugal Learning
DHBW | MVA | IRISA | UBretagne Sud
Domain adapter
-
Chef de projet Serkan Odabas
Chef de projet
AI Norms, Regulations, Standardization | Management
Sorbonne Université | Inria
Gamer
-
Chercheur Gilles Puy
Chercheur
Computer Vision | Deep Learning
Supélec | EPFL | INRIA | Technicolor
-
Chercheur Nermin Samet
Chercheur
Deep learning | Computer Vision
METU | ENPC
Book wanderer
-
Doctorant Corentin Sautier
Doctorant
Computer Vision | Deep Learning | Self-supervised Learning
Mines Paris | MVA | ENPC
Annotations hater
-
Doctorant Sophia Sirko-Galouchenko
Doctorant
Deep learning | Computer Vision
DauphineU | MVA | SorbonneU
Borscht-powered Cyborg
-
Chercheur senior Eduardo Valle
Chercheur senior
Computer Vision | Deep Learning | Generative AI
CergyU | University of Campinas
Neural optimizer
-
Chercheur Tuan-Hung Vu
Chercheur
Deep Learning | Computer Vision | Robustness | Generative AI
Telecom | Inria | NEC
Protein lover
-
Chercheur Yihong Xu
Chercheur
Deep Learning | Computer Vision | Motion and Tracking
Telecom Bretagne | Inria | UGA
Troublemaker
-
Chercheur Eloi Zablocki
Chercheur
Deep Learning | Computer Vision | Vision and Language
X | MVA | SorbonneU
Substancial learner