Valeo.ai
Since 2017, our artificial intelligence research center has been at the forefront of AI research in the automotive industry, especially in the fields of assisted and autonomous driving. Twelve years ago there was no real AI in cars. Today, most new cars are packaged with software, much of it AI-related.
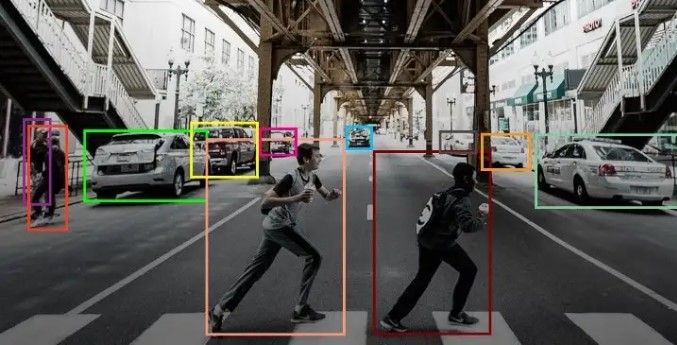
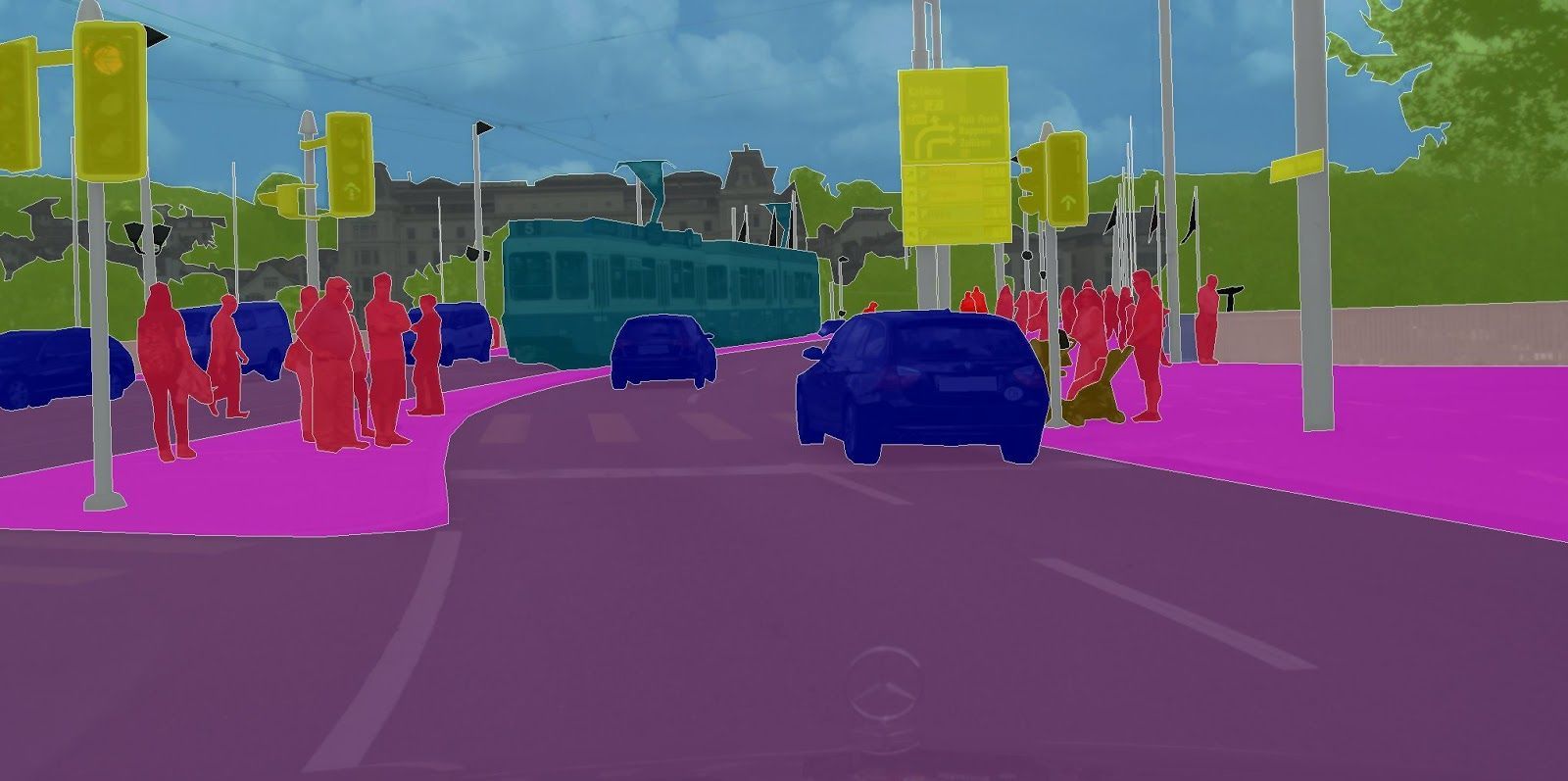
Scene understanding through multiple arrays of sensors
Autonomous vehicles are equipped with various sensors, including cameras, LiDARs (Light Detection And Ranging), radars, ultrasonic sensors, and inertial measurement units, which collectively provide a comprehensive understanding of the environment.
The data from these sensors are fused to create a map of the surroundings, crucial for the vehicle to perceive and understand its environment.
Data & annotation efficient learning
Collecting and annotating large datasets is costly and time-consuming. Our researchers are exploring alternatives to traditional fully-supervised learning, thus alleviating the annotation costs.
Research in open-world perception is also concerned with building models that can detect and adapt to novel objects and situations, while still providing safe and consistent operations within real-world dynamic environments.
Dependable models
Autonomous vehicles are mission-critical devices that require the utmost care in their design for a safe and robust deployment.
Self-driving vehicles must drive with confidence in contexts that are new or unexpected in comparison to their training scenarios, a goal assisted by domain generalization. That involves building systems that can adapt their learning to new environments, with reliable results in practical scenarios.
Our research also comprises methods to provide clear explanations for the decisions made by those complex systems, with the ultimate goal of providing transparency about their behavior in both normal and abnormal scenarios. We aim to improve the trust in those systems by, for example, anticipating, explaining, and eliminating biases that could lead to incidents.
Meet our team
-
 R&I Technical Engineer Florent Bartoccioni
R&I Technical Engineer Florent Bartoccioni
R&I Technical Engineer
Perception | Scene understanding | Dynamic forecasting
ENS Rennes | CTU Prague | INRIA
Pragmatic dreamer


-
 Research Scientist Victor Besnier
Research Scientist Victor Besnier
Research Scientist
Deep Learning | Computer Vision | Image Synthesis
Sorbonne Université | ENPC
-
 Research Scientist Alexandre Boulch
Research Scientist Alexandre Boulch
Research Scientist
Computer vision | Deep Learning | Geometry processing
X | MVA | ENPC | ONERA
3D perceiver
-
 Senior Research Scientist Andrei Bursuc
Senior Research Scientist Andrei Bursuc
Senior Research Scientist
Machine Learning | Computer Vision | Reliability | Self-supervised learning
Politehnica | Mines | Inria | Safran
Random walker
-
PhD student Amaia Cardiel
PhD student
Deep learning | Vision and Language
SciencesPo | SorbonneU | UGA
Language learner
-
Ph.D. student Loick Chambon
Ph.D. student
Deep learning |Computer Vision
MVA | Sorbonne
Climber
-
Research Scientist Mickaël Chen
Research Scientist
Generative Models | Forecasting
Sorbonne Université
Entropy producer

-
Scientific Director Matthieu Cord
Scientific Director
Deep Learning | Computer Vision | Vision and Language
Enseirb | CergyU | KULeuven | Ensea | CNRS | SorbonneU | IUF
Top chef
-
Research Scientist Spyros Gidaris
Research Scientist
Deep Learning | Computer Vision
AUTH | Cortexica | ENPC
Life-loving epicurean
-
 Research Scientist David Hurych
Research Scientist David Hurych
Research Scientist
Machine Learning | Computer Vision | Generative Networks
CTU-Prague | NII-Tokyo
Curious
-
Ph.D student Victor Letzelter
Ph.D student
Deep Learning | Uncertainty Quantification | Signal processing
Telecom Paris | MVA | EMSE
Landscape explorer
-
Principal scientist Renaud Marlet
Principal scientist
Computer vision | Scene Understanding | 3D | Geometry Processing
X | Inria | EdinburgU | Simulog | Inria | TrustedLogic | Inria | ENPC
Persistent eclectist
-
PhD student Tetiana Martyniuk
PhD student
Deep learning | Computer Vision
Mines Paris | INRIA
Proud Ukrainian
-
Ph.D. student Björn Michele
Ph.D. student
Computer vision | Deep Learning | Frugal Learning
DHBW | MVA | IRISA | UBretagne Sud
Domain adapter
-
Project manager Serkan Odabas
Project manager
AI Norms, Regulations, Standardization | Management
Sorbonne Université | Inria
Gamer
-
Research Scientist Gilles Puy
Research Scientist
Computer Vision | Deep Learning
Supélec | EPFL | INRIA | Technicolor
-
Research Scientist Nermin Samet
Research Scientist
Deep learning | Computer Vision
METU | ENPC
Book wanderer
-
Ph.D. student Corentin Sautier
Ph.D. student
Computer Vision | Deep Learning | Self-supervised Learning
Mines Paris | MVA | ENPC
Annotations hater
-
PhD student Sophia Sirko-Galouchenko
PhD student
Deep learning | Computer Vision
DauphineU | MVA | SorbonneU
Borscht-powered Cyborg
-
Senior scientist Eduardo Valle
Senior scientist
Computer Vision | Deep Learning | Generative AI
CergyU | University of Campinas
Neural optimizer
-
Research scientist Tuan-Hung Vu
Research scientist
Deep Learning | Computer Vision | Robustness | Generative AI
Telecom | Inria | NEC
Protein lover
-
Research Scientist Yihong Xu
Research Scientist
Deep Learning | Computer Vision | Motion and Tracking
Telecom Bretagne | Inria | UGA
Troublemaker
-
Research Scientist Eloi Zablocki
Research Scientist
Deep Learning | Computer Vision | Vision and Language
X | MVA | SorbonneU
Substancial learner